产品:27
产品:27

发那科FANUC机器人配件:机器人坐标系三点法设置方法
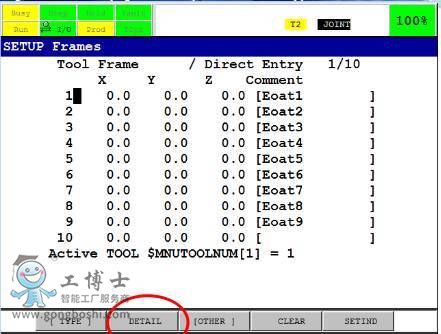
DETAIL–METHOD–回车进入三点法界面:
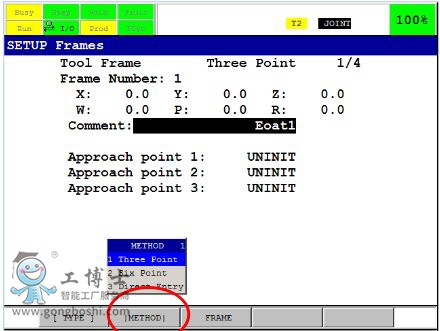
发那科FANUC机器人三点法操作步骤:
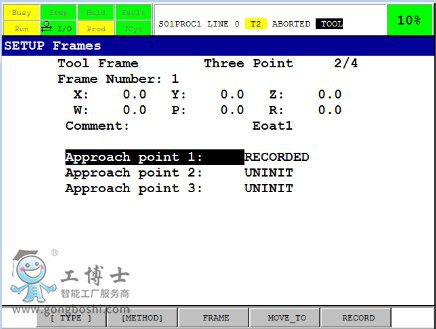
A、记录接近点1:
a.移动光标到接近点1(Approachpoint1);
b.把示教坐标切换成全局坐标(WORLD)后移动机器人,使工具**接触到基准点;
c.按【SHIFT】+F5【RECORD】(位置记录)记录

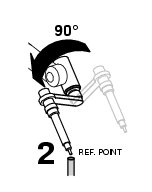
B、记录接近点2:
a.移动光标到接近点2(Approachpoint2);
b.把示教坐标切换成关节坐标(JOINT),旋转J6轴(法兰面)至少90度,不要超过360度;
c.把示教坐标切换成全局坐标(WORLD)后移动机器人,使工具**接触到基准点;
d.按【SHIFT】+F5【RECORD】(位置记录)记录;
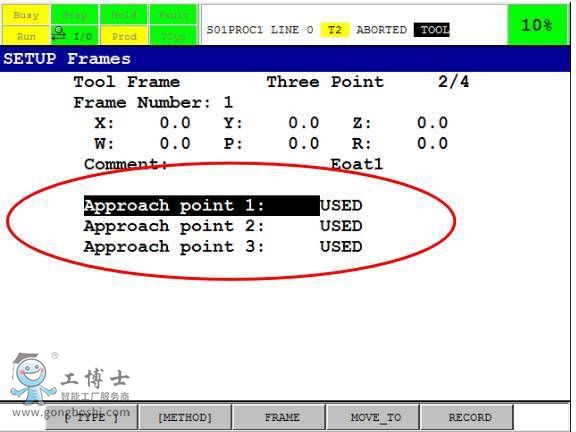
C、记录接近点3:
a.移动光标到接近点3(Approachpoint3);
b.把示教坐标切换成关节坐标(JOINT),旋转J4轴和J5轴,不要超过90度;
c.把示教坐标切换成全局坐标(WORLD)后移动机器人,工具**接触到基准点;
d.按【SHIFT】+F5【RECORD】(位置记录)记录;